سنسور ها در رباتیک
سنسورها یکی از بخشهای اساسی در رباتها هستند و در سیستم عامل ربات(ROS) از طریق تاپیک ها ارسال میشوند. ارسال داده های تاپیک مربوط به یک سنسور در مواردی ضروری است. یک ربات برای انجام وظایف خود به دادههای خروجی پکیج سنسور وابسته است. اگر تاپیک مربوط به سنسورها به علت مشکلی قطع یا بدون خروجی شوند. ربات غیرقابل پیشبینیشده یا اشتباه عمل میکند. چراکه دادههای ورودی آن طوری که باید باشد، نیست. در گیتهاب ابزاری به نام پکیج rosshow برای تسهیل بررسی و نمایش مقدار سنسورها ساختهشدهاست.
نمایش سنسورها در ROS
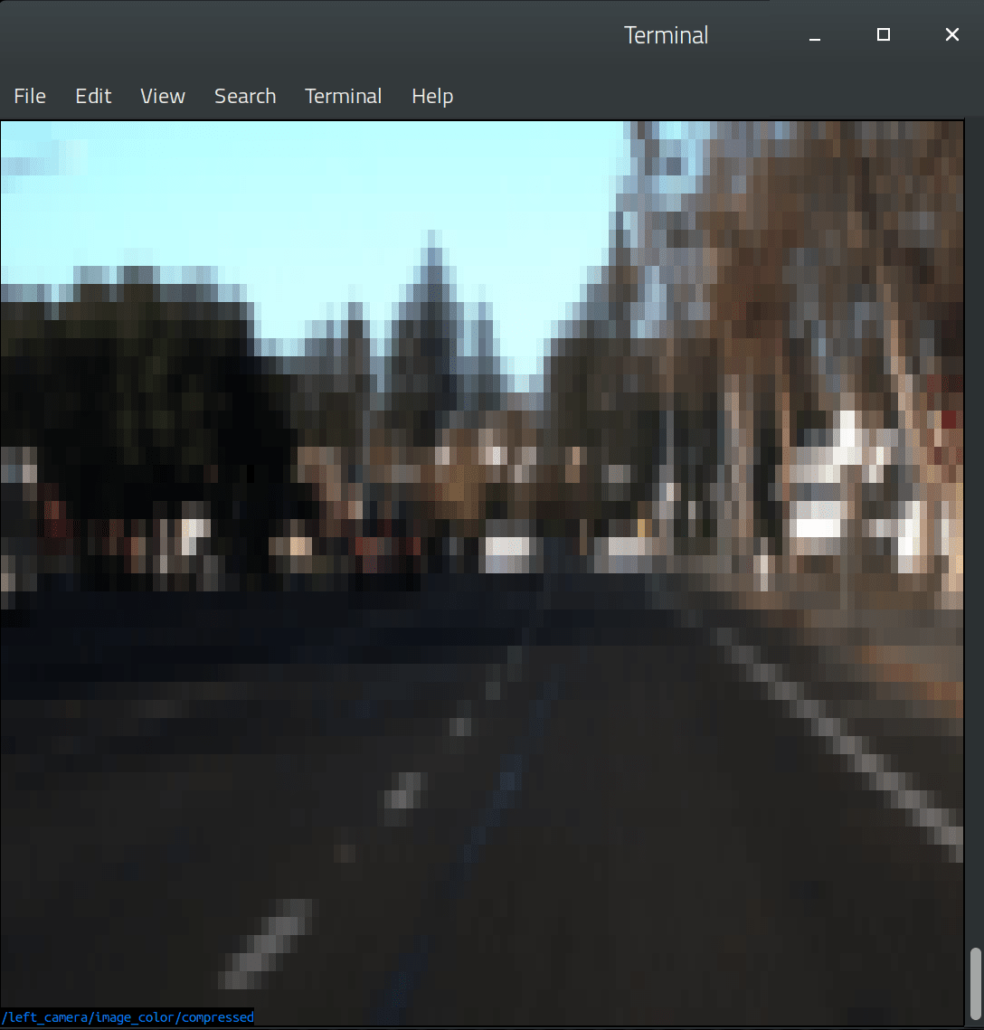
بهصورت عادی، اگر بخواهیم با یک دوربین در ربات کار کنیم، بایستی یک مانیتور و ابزارهای جانبی را به ربات متصل کنیم . سپس بهصورت دستی بررسیهای لازم را انجام دهیم و بعد از اتمام کار همهی وسایل را جدا میکنیم. البته مشخص است که این کار خسته کننده است و اگر چندین بار این کار تکرار شود لذت بخش نخواهد بود.
کاربرد rosshow
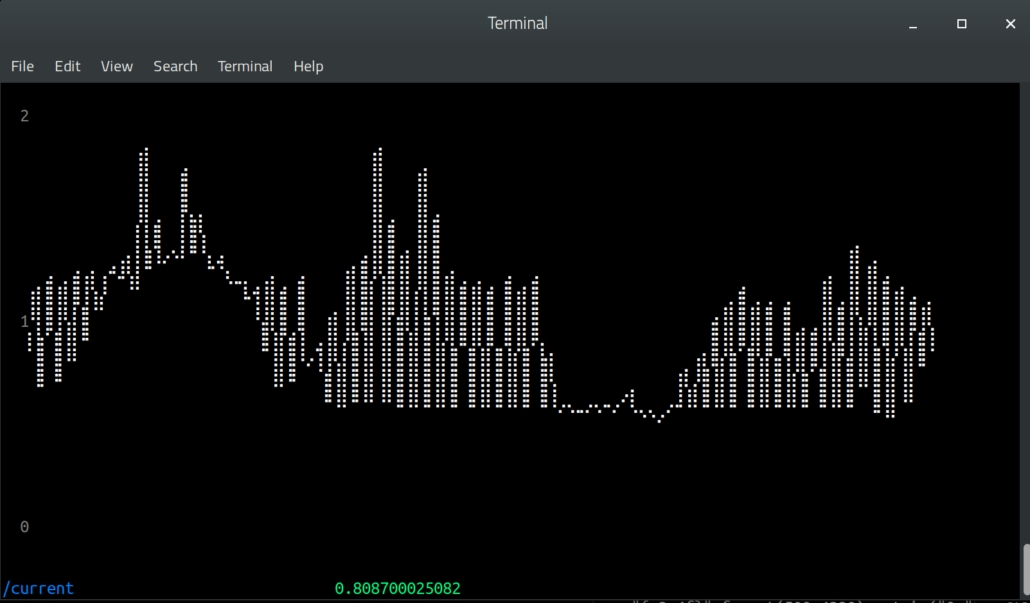
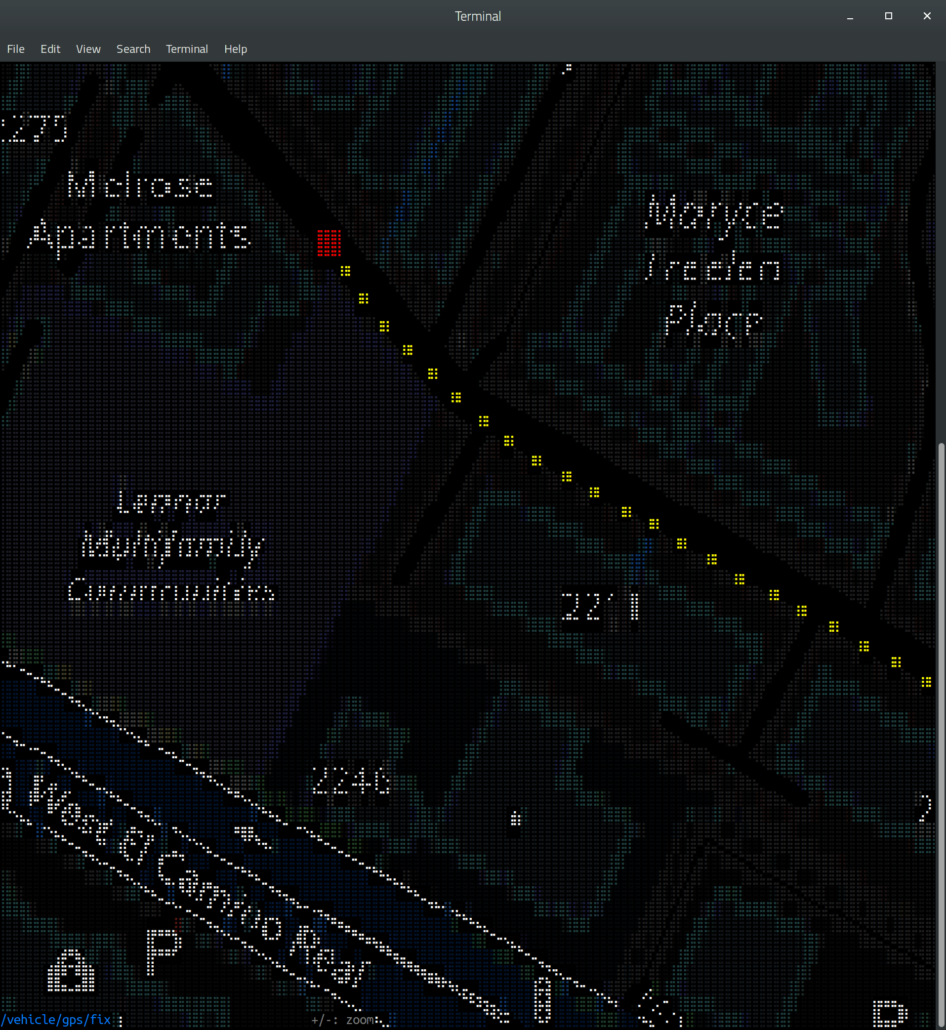
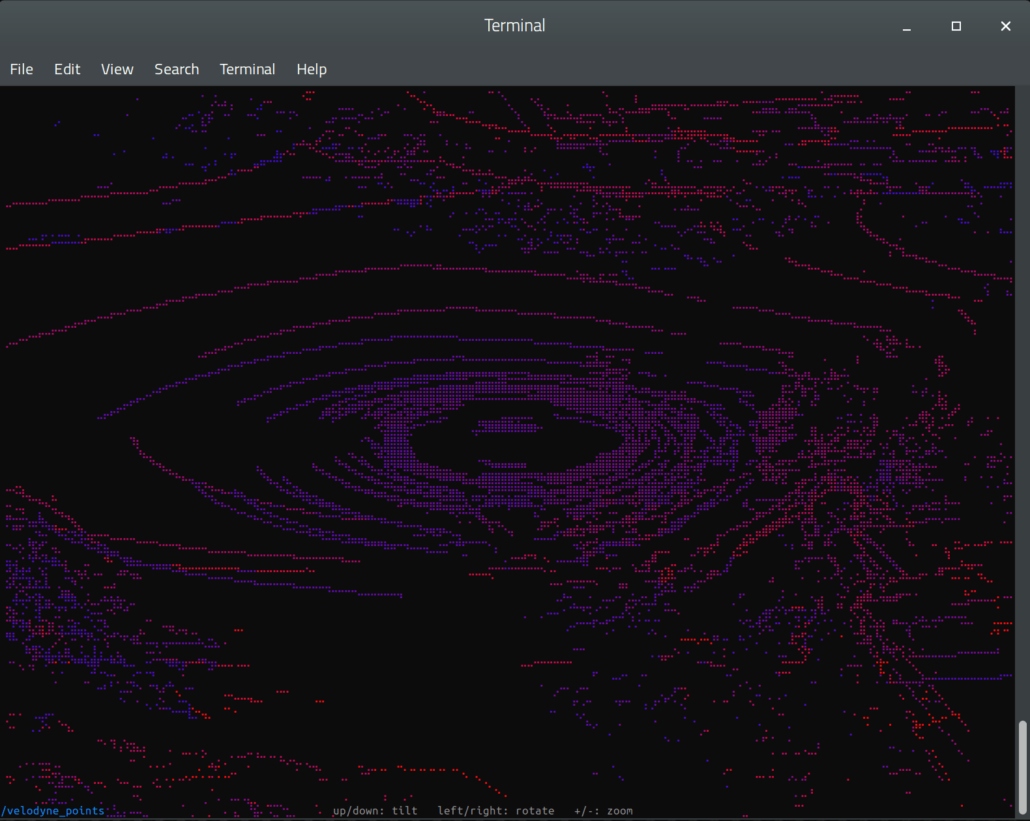
ما اعتقاد داریم باید از همهی ابزارهای ممکن برای تسهیل کارها استفاده کنیم. به جای کارهای قبل، rosshow با قدرت گرفتن از SSH کارهای ما را ساده تر میکند. در ربات خود میتوانید با چند دستور و شروع به کار rosshow، اطلاعات سنسورهای خود را از طریق ترمینال در ماشین دیگر مشاهده کنید. این مهم با کمک Unicode Braille امکانپذیر شده است. مطمئناً شما رزولوشن کامل دوربین حرفهای خود را نخواهید داشت. همچنین اطلاعات اسکنر لیزری شما به صورت کاملاً واقعی نخواهد بود. اما این اطلاعات کافی هستند تا شما از اتصال سنسور خود مطمئن شده و کارکرد صحیح آن را تایید کنید بدون آنکه نیازی باشد تا کارهای طاقت فرسایی انجام دهید.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
دیدگاه خود را ثبت کنید
تمایل دارید در گفتگوها شرکت کنید؟در گفتگو ها شرکت کنید.