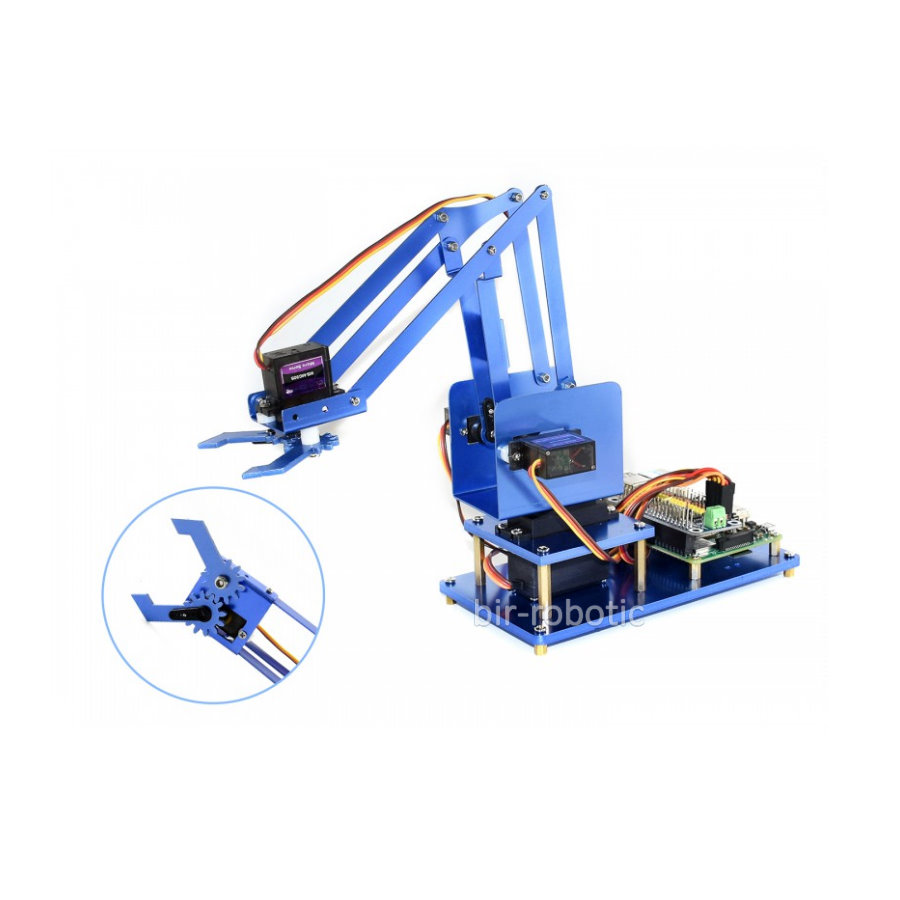



معرفی کیت بازوی رباتیک رزبری پای
توسط کیت ربات بازو میتوانید رزبری پای و میکروبیت (micro:bit) را به یک کیت ربات بازو با 4 درجه آزادی و فلزی تجهیز کنید. از این طریق شما میتوانید جهان هوشمصنوعی را بههمراه کیت بازوی رباتیک کشف کنید.
این کیت استارتر ربات بازو شامل: برد راهانداز سرو، ساختار فلزی مکانیکی بازو و 4 عدد سرو با چرخ دندهی فلزی میباشد. هنگامی که از میکروبیت یا رزبریپای استفاده میکنید، میتوانید از طریق گوشی موبایل و ارتباط بلوتوث یا WiFi کیت بازوی رباتیک را کنترل کنید.
راهانداز Servo
ماژول راهانداز Servo برای کیت ربات بازو در گزینههای خرید برای micro:bit و Raspberry Pi متفاوت است. لطفا در صورتی که این کیت را برای رزبریپای خرید میکنید “Kit for Raspberry Pi” و اگر برای میکروبیت خرید میکنید گزینهی “Kit for micro:bit” را انتخاب کنید.
درایور Servo برای رزبری پای (HAT)
- کیت ربات بازو توسط Raspberry Pi HAT قابلیت اتصال به رزبری پای را دارد. نسخههای رزبریپای Zero/ Zero W/ Zero WH/ 2B/3B/3B+ نیز پشتیبانی میشود.
- ماژول از طریق I2C کنترل شده و تنها توسط دو پین پیکربندی میشود.
- رگولاتور 5 ولت داخلی دارد که تا 3 آمپر جریان خروجی را تحمل میکند و میتواند توسط پین VIN با باتری راهاندازی شود.
- دارای رابط استاندارد سرو که برای SG90 ،MG90S و MG996R و.. میباشد.
- شامل راهنما و اسناد توسعه (مثال در پایتون کنترل از راه دور بلوتوث و WiFi) میباشد.
- پینهای کنترل I2C، برای اتصال به بردهای دیگر بهصورت رزرو دارد.
ساختار بازوی رباتیک
- 4 درجه آزادی، پایه مستحم و بزرگ، گریپر مکانیکی و فلزی
- بدنه کاملاً آلومینیوم، سطح اکسیداسیون سندبلاست، قوی و با دوام
- ساختار هوشمند مکانیکی و طراحی نصب، کنترل چابک، ساختن آسان
- مجهز به 4 سرو با چرخدنده فلزی (1x MG996R، 3x MG90S)، نیروی گشتاور بزرگ، حرکت نرم
محتوای بسته
دقت کنید بسته شامل برد Raspberry Pi نمیباشد.
- x1 بخشهای فلزی بدنه
- x1 سرو موتور MG996R
- x3 سرو موتور MG90S
- x1 چرخ سرو MG996R
- x1 ماژول راهانداز برای Raspberry Pi HAT
- x1 منبع تغذیه 5 ولت، 3 آمپر
- x1 سیم اتصال سرو 150 میلیمتر
- x1 مجموعه پیچها
برای کسب اطلاعات بیشتر با کارشناسان فروشگاه تماس بگیرید.













مهدی –
سلام، آیا امکان اتصال این بازو به آردوینو وجود دارد؟
ahrovan –
سلام و عرض ادب
به صورت پیش فرض این امکان توسط سازنده قرار داده نشده. ولی سورس این کیت با آردوینو ساخته و تست شده است و به سادگی می توان این کیت را با آردوینو راه اندازی کرد.
میلاد –
سلام
چه راهی رو پیشنهاد میکنین برای اینکه بتونیم انجام یه پروسه تکراری رو برای ربات تعریف کنیم؟
ahrovan –
سلام و عرض ادب
بستگی به ربات و محیط برنامه نویسی داره، معمولا پروسه تکراری رو باید داخل حلقه بدارید و با پرچم ها حلقه رو مدیریت کنید.
محمد –
سلام من میخواستم یه مدل صنعتی بازو رباتیک رو بسازم ولی در ابعاد کوچک تر ۶ درجه آزادی. برای کنترل این بازو بهتره از چی استفاده بکنم؟ ارداینو یا رزبری یا کنترلر pid
آرش ولی پور –
سلام تفاوتی نداره بستگی به کاربردش داره اگر نیاز به پردازش تصویر هست میتونید از رزبری پای استفاده کنید. این برد رو پیشنهاد میکنم تهیه کنید که هم با رزبری پای سازگار هست هم میتونید کامپیوتر شخصی کنترل کنید و کلی اموزش و راهنمایی داره (درایور چند منظوره ربات بر پایه ESP32)